




Attitude measurement system




Product Features
MS-100A0 is a three-degree-of-freedom attitude based on micro-mechanical technology (MEMS)
Measurement system, built-in high-performance MEMS gyroscope and MEMS accelerometer, through the filtering algorithm calculates the pitch angle, roll angle and heading angle of the carrier in real time. also optionally matched with a magnetometer to achieve high-precision north finding, and output 3-axis angular velocity and 3-axis acceleration is used for motion control.
Product Characteristic
- Better than 0.1° attitude accuracy
- Attitude measurement range ±90°
- Operating temperature range: -40~65℃
- Vibration environment: 10~2000Hz, 6g (RMS)
- Rich interface types, support RS232, RS422, CAN and other standard interfaces
- Waterproof seal design
Electrical Characteristics
- Power supply: 5V (typ.), customizable wide voltage input 12~36V
- Rated power: 0.5W (max)
- Ripple: 100mV (peak-to-peak)
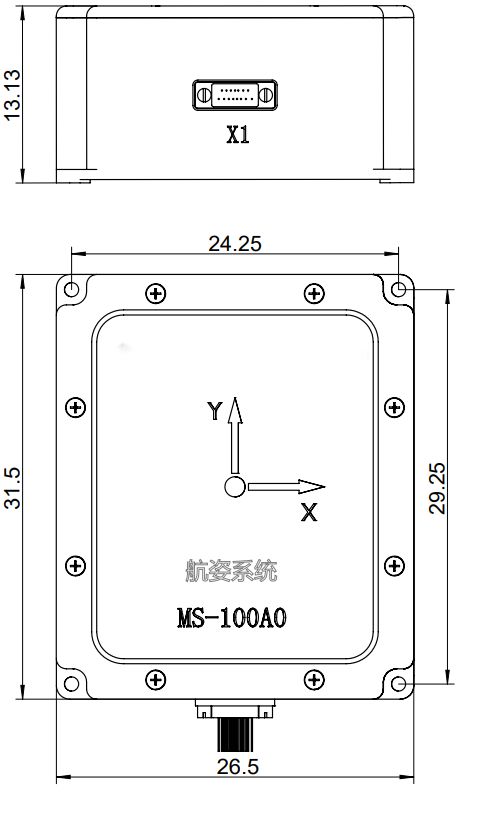
Mechanical Dimensions
Technical indicators
|
Gyro parameters |
||||
|
Parameter |
Test Conditions |
Typical value |
Max value |
Unit |
|
Dynamic measurement range |
|
|
450 |
º/s |
|
Zero bias stability |
Allan variance, Z axis |
0.8 |
|
º/h |
|
Allan variance, X-axis and Y-axis |
1.6 |
|
º/h |
|
|
10s average, X, Y axis (-40℃~+80℃, constant temperature) |
6 |
|
º/h |
|
|
1s average, X, Y axis (-40℃~+80℃, constant temperature) |
9 |
|
º/h |
|
|
Zero offset |
Zero offset range |
±0.2 |
|
º/s |
|
Zero bias change over the full temperature range |
±0.06 |
|
º/s |
|
|
Start-to-start repeatability |
0.006 |
|
º/s |
|
|
Day-to-day start repetition |
0.009 |
|
º/s |
|
|
Influence of Linear Acceleration on Zero Bias |
0.002 |
|
º/s |
|
|
The influence of vibration on zero offset, the change before and after vibration |
0.002 |
|
º/s |
|
|
The influence of vibration on zero offset, the change before vibration |
0.002 |
|
º/s |
|
|
Scale Factor |
Scale factor accuracy, Z axis |
0.3 |
|
% |
|
Scale factor accuracy, X, Y axis |
0.6 |
|
% |
|
|
Scale factor nonlinearity, Z axis |
0.01 |
|
%FS |
|
|
Scale factor nonlinearity, X, Y axis |
0.02 |
|
%FS |
|
|
Angle random walk |
|
0.001 |
|
°/√hr |
|
Noise density |
|
0.001 |
|
°/s/√hr |
|
Resolution |
|
3.052×10−7 |
|
º/s/LSB |
|
Bandwidth |
|
200 |
|
Hz |
|
Accelerometer parameters |
||||
|
Parameter |
Test conditions |
Typical value |
Max value |
Unit |
|
Dynamic measurement range |
|
16 |
|
g |
|
Zero bias stability |
Allan variance |
0.03 |
|
mg |
|
10s average (-40℃~+80℃, constant temperature) |
0.2 |
|
mg |
|
|
1s average (-40℃~+80℃, constant temperature) |
0..3 |
|
mg |
|
|
Zero offset |
Zero offset range |
5 |
|
mg |
|
Zero offset variation (peak-to-peak) over the full temperature range |
5 |
|
mg |
|
|
Start-to-start repeatability |
0.5 |
|
mg |
|
|
Day-to-day start repetition |
0.8 |
|
mg |
|
|
Zero Bias Temperature Coefficient |
0.05 |
0.1 |
mg/℃ |
|
|
Scale factor |
Scale factor accuracy |
0.5 |
|
% |
|
Scale factor nonlinearity |
0.1 |
|
%FS |
|
|
Speed random walk |
|
0.029 |
|
m/s/√hr |
|
Noise density |
|
0.025 |
|
mg/√Hz |
|
Resolution |
|
1.221×10−8 |
|
g/LSB |
|
Bandwidth |
|
200 |
|
Hz |
|
Magnetometer parameters (optional) |
||||
|
Parameter |
Test conditions |
Typical value |
Max value |
Unit |
|
Dynamic measurement range |
|
2.5 |
|
gauss |
|
Zero offset |
Non-magnetic environment |
15 |
|
mgauss |
|
Heading accuracy |
||||
|
Magnetic heading accuracy |
|
0.5 |
|
° |
|
Horizontal attitude accuracy |
||||
|
Pitch angle accuracy |
|
0.1 |
|
° |
|
Roll angle accuracy |
|
0.1 |
|
° |
|
Gyro parameters |
||||
|
Parameter |
Test Conditions |
Typical value |
Max value |
Unit |
|
Dynamic measurement range |
|
|
450 |
º/s |
|
Zero bias stability |
Allan variance, Z axis |
0.8 |
|
º/h |
|
Allan variance, X-axis and Y-axis |
1.6 |
|
º/h |
|
|
10s average, X, Y axis (-40℃~+80℃, constant temperature) |
6 |
|
º/h |
|
|
1s average, X, Y axis (-40℃~+80℃, constant temperature) |
9 |
|
º/h |
|
|
Zero offset |
Zero offset range |
±0.2 |
|
º/s |
|
Zero bias change over the full temperature range |
±0.06 |
|
º/s |
|
|
Start-to-start repeatability |
0.006 |
|
º/s |
|
|
Day-to-day start repetition |
0.009 |
|
º/s |
|
|
Influence of Linear Acceleration on Zero Bias |
0.002 |
|
º/s |
|
|
The influence of vibration on zero offset, the change before and after vibration |
0.002 |
|
º/s |
|
|
The influence of vibration on zero offset, the change before vibration |
0.002 |
|
º/s |
|
|
Scale Factor |
Scale factor accuracy, Z axis |
0.3 |
|
% |
|
Scale factor accuracy, X, Y axis |
0.6 |
|
% |
|
|
Scale factor nonlinearity, Z axis |
0.01 |
|
%FS |
|
|
Scale factor nonlinearity, X, Y axis |
0.02 |
|
%FS |
|
|
Angle random walk |
|
0.001 |
|
°/√hr |
|
Noise density |
|
0.001 |
|
°/s/√hr |
|
Resolution |
|
3.052×10−7 |
|
º/s/LSB |
|
Bandwidth |
|
200 |
|
Hz |
|
Accelerometer parameters |
||||
|
Parameter |
Test conditions |
Typical value |
Max value |
Unit |
|
Dynamic measurement range |
|
16 |
|
g |
|
Zero bias stability |
Allan variance |
0.03 |
|
mg |
|
10s average (-40℃~+80℃, constant temperature) |
0.2 |
|
mg |
|
|
1s average (-40℃~+80℃, constant temperature) |
0..3 |
|
mg |
|
|
Zero offset |
Zero offset range |
5 |
|
mg |
|
Zero offset variation (peak-to-peak) over the full temperature range |
5 |
|
mg |
|
|
Start-to-start repeatability |
0.5 |
|
mg |
|
|
Day-to-day start repetition |
0.8 |
|
mg |
|
|
Zero Bias Temperature Coefficient |
0.05 |
0.1 |
mg/℃ |
|
|
Scale factor |
Scale factor accuracy |
0.5 |
|
% |
|
Scale factor nonlinearity |
0.1 |
|
%FS |
|
|
Speed random walk |
|
0.029 |
|
m/s/√hr |
|
Noise density |
|
0.025 |
|
mg/√Hz |
|
Resolution |
|
1.221×10−8 |
|
g/LSB |
|
Bandwidth |
|
200 |
|
Hz |
|
Magnetometer parameters (optional) |
||||
|
Parameter |
Test conditions |
Typical value |
Max value |
Unit |
|
Dynamic measurement range |
|
2.5 |
|
gauss |
|
Zero offset |
Non-magnetic environment |
15 |
|
mgauss |
|
Heading accuracy |
||||
|
Magnetic heading accuracy |
|
0.5 |
|
° |
|
Horizontal attitude accuracy |
||||
|
Pitch angle accuracy |
|
0.1 |
|
° |
|
Roll angle accuracy |
|
0.1 |
|
° |


